
L I V E S I M U L A T I O N
4DV-SIMULATOR is a real-time 3D and Hardware-In-the-Loop simulation platform used for the development of robotic systems: vehicles, robots and drones.
You emulate your intelligent systems in a 3D virtual environment similar to an operational use-case.
The degree of realism and the capabilities of 4DV-SIMULATOR let you evaluate and certify any type of robotic application using perception systems, control and command, automation, signal processing, embedded computing, radio communication.
4DV – SIMULATOR
L I V E S I M U L A T I O N
4DV-SIMULATOR is a real-time 3D and Hardware-In-the-Loop simulation platform used for the development of robotic systems: vehicles, robots and drones.
You emulate your intelligent systems in a 3D virtual environment similar to an operational use-case.
The degree of realism and the capabilities of 4DV-SIMULATOR let you evaluate and certify any type of robotic application using perception systems, control and command, automation, signal processing, embedded computing, radio communication.
Different categories of sensors
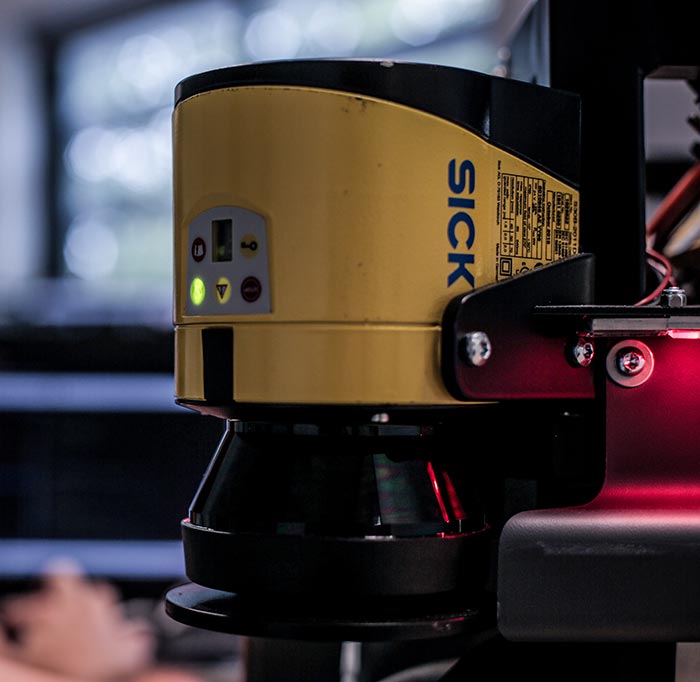
4D-Virtualiz brings its expertise in robotics and propose sensor models consistent with their real counterparts: measurement method, interactions with the environment, disturbances, performances and hardware characteristics (connectors, media and protocols).
These sensors can be used either in 4DV-SIMULATOR through generic models entirely customizable, or through configured and simulated models in accordance with the real sensors provided by retailers, same as those mounted on real embedded systems.
We can simulate the following sensors:
- Pin-hole Camera
- FishEye Camera
- Omnidirectional Camera
- Depth Camera
- Normal Camera
- Semantic Camera
- 2D Lidar
- 3D Lidar
- Inertial Measurement Unit (IMU)
- GNSS
- Altimeter
- Gyro-meter
- Anemometer
- Odometer
- Positioning sensor
Different categories of sensors
4D-Virtualiz brings its expertise in robotics and propose sensor models consistent with their real counterparts: measurement method, interactions with the environment, disturbances, performances and hardware characteristics (connectors, media and protocols).
These sensors can be used either in 4DV-SIMULATOR through generic models entirely customizable, or through configured and simulated models in accordance with the real sensors provided by retailers, same as those mounted on real embedded systems.
- Pin-hole Camera
- FishEye Camera
- Omnidirectional Camera
- Depth Camera
- Normal Camera
- Semantic Camera
- 2D Lidar
- 3D Lidar
- Inertial Measurement Unit (IMU)
- GNSS
- Altimeter
- Gyro-meter
- Anemometer
- Odometer
- Positioning sensor
PROPRIETARY SENSORS INCLUDED IN THE SIMULATOR





Different types of systems
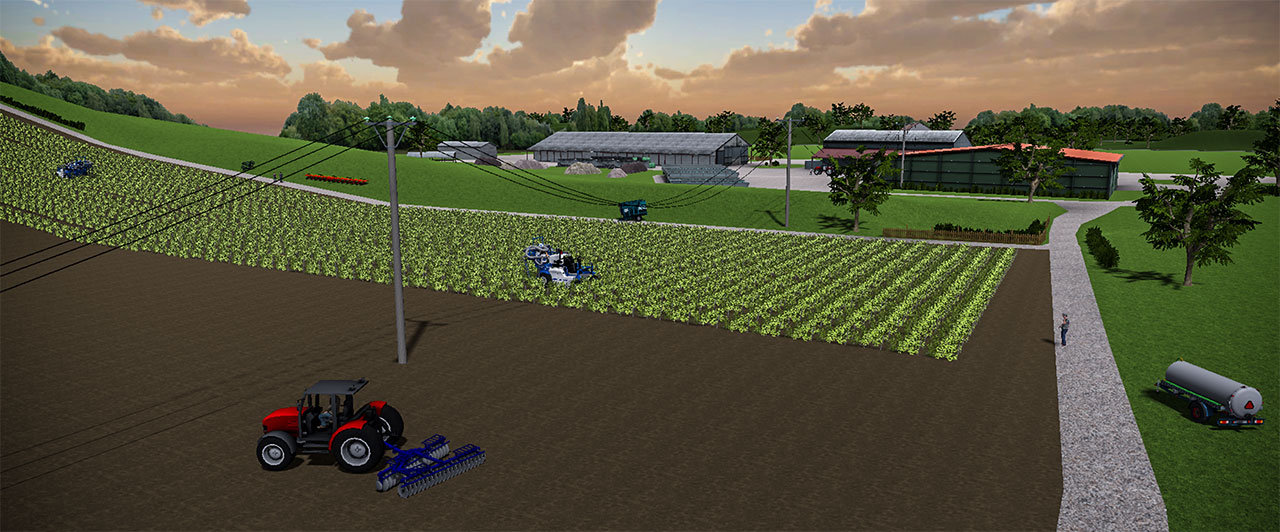
4DV-SIMULATOR uses representative models of robotic systems: vehicles, robots, drones, robotic arms.
The dynamic behaviour of these systems is based on the technical and physical constraints of their real counterparts. For example the obstacle-clearing capability, the stability, the wheel/ground contacts, the wind disturbance with the drones, the collision management, etc.
We can simulate the following systems:
- Wheeled vehicles
- Vehicles with one or more driving wheels
- Vehicles with multiples motorized wheels
- Vehicles on rails
- Tracked vehicles
- Drones
- Engines with turret
- Construction and agricultural machinery
- Bucket truck
- Forklift
- Hitched systems
- Polyarticulated robotic arm
Different types of systems
4DV-SIMULATOR uses representative models of robotic systems: vehicles, robots, drones, robotic arms.
The dynamic behaviour of these systems is based on the technical and physical constraints of their real counterparts. For example the obstacle-clearing capability, the stability, the wheel/ground contacts, the wind disturbance with the drones, the collision management, etc.
We can simulate the following systems:
- Wheeled vehicles
- Vehicles with one or more driving wheels
- Vehicles with multiples motorized wheels
- Vehicles on rails
- Tracked vehicles
- Drones
- Engines with turret
- Construction and agricultural machinery
- Bucket truck
- Forklift
- Hitched systems
- Polyarticulated robotic arm
An open simulation
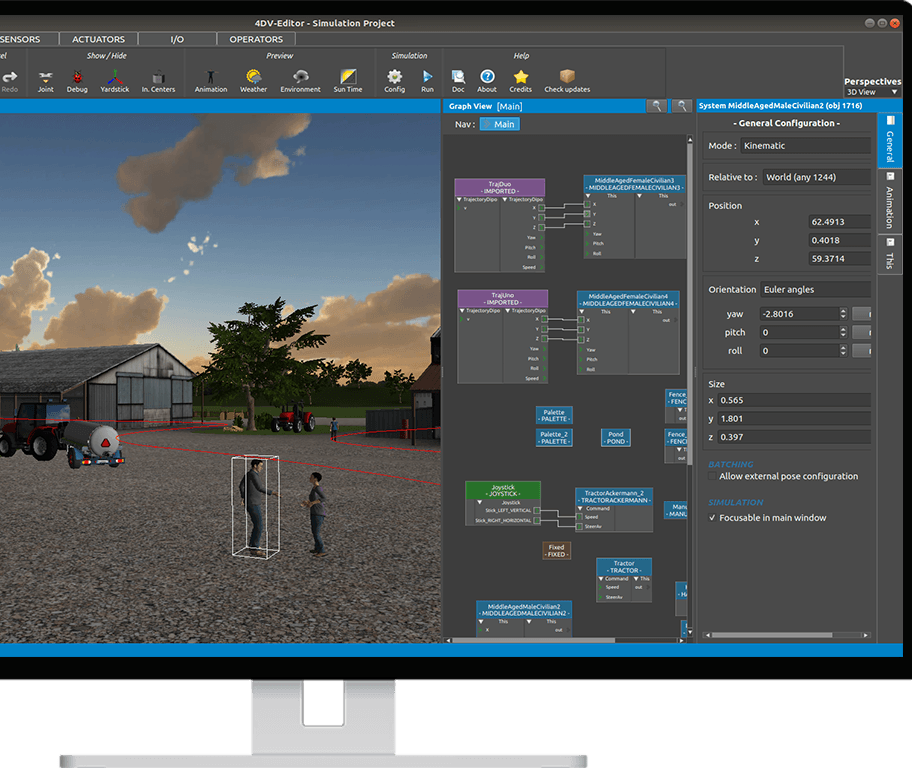
4DV-SIMULATOR has been developed as a plug-an-play tool to facilitate the connection with your hardware (pilot systems, acquisition cards, calculator, work station, automaton, etc). This H.I.L (Hardware In the Loop) interface provides an efficient integration for perception and control applications, the development of embedded artificial intelligence and the configuration of communication systems.
After validating the behaviour of your application thanks to the simulation, you can directly use the results of your developments for adjusting real experiments.
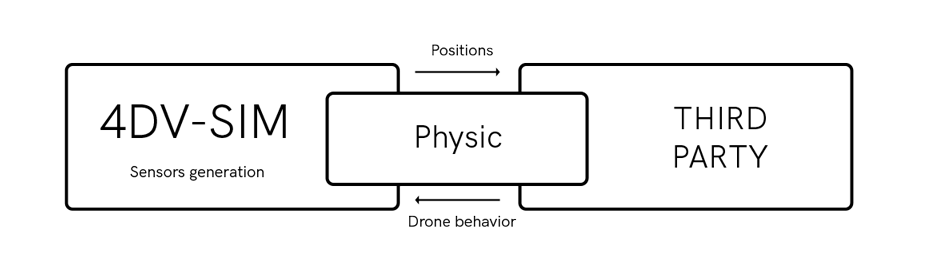
It is also possible to use 4DV-SIMULATOR as a co-simulation tool paired with other softwares or simulators. You can define in 4DV-EDITOR the communication method and the input/output data exchanges in order to customize the development and testing architecture.

An open simulation
4DV-SIMULATOR has been developed as a plug-an-play tool to facilitate the connection with your hardware (pilot systems, acquisition cards, calculator, work station, automaton, etc). This H.I.L (Hardware In the Loop) interface provides an efficient integration for perception and control applications, the development of embedded artificial intelligence and the configuration of communication systems.
After validating the behaviour of your application thanks to the simulation, you can directly use the results of your developments for adjusting real experiments.
It is also possible to use 4DV-SIMULATOR as a co-simulation tool paired with other softwares or simulators. You can define in 4DV-EDITOR the communication method and the input/output data exchanges in order to customize the development and testing architecture.
Making realistic simulations
Experts from 4D-Virtualiz work continuously on the development of optimized and realistic tools in order to maximize the simulation capacity in terms of agents and systems. Therefore, you have the ability to make digital twins including a set-up with multiple sensors.
The 4DV-SIMULATOR technology includes several computation engines (visual rendering, physics computation, agents management, etc).
All those elements interact consistently thanks to a specific patented simulation engine, ensuring a functional 3D real-time simulation..
Moreover, 4DV-SIM is able to adapt to your simulation requirements with a scalable hardware architecture (additional calculators, cards) and software structure.
Making realistic simulations
Experts from 4D-Virtualiz work continuously on the development of optimized and realistic tools in order to maximize the simulation capacity in terms of agents and systems. Therefore, you have the ability to make digital twins including a set-up with multiple sensors.
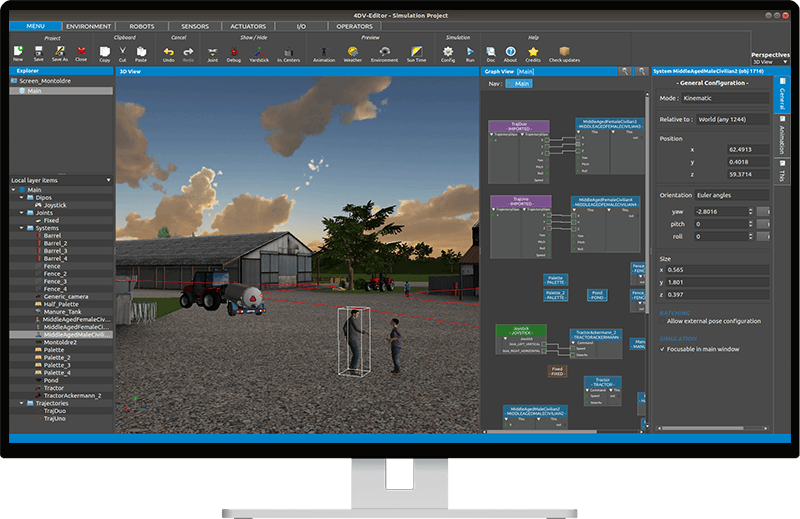
The 4DV-SIMULATOR technology includes several computation engines (visual rendering, physics computation, agents management, etc).
All those elements interact consistently thanks to a specific patented simulation engine, ensuring a functional 3D real-time simulation.
Moreover, 4DV-SIM is able to adapt to your simulation requirements with a scalable hardware architecture (additional calculators, cards) and software structure.
Resources
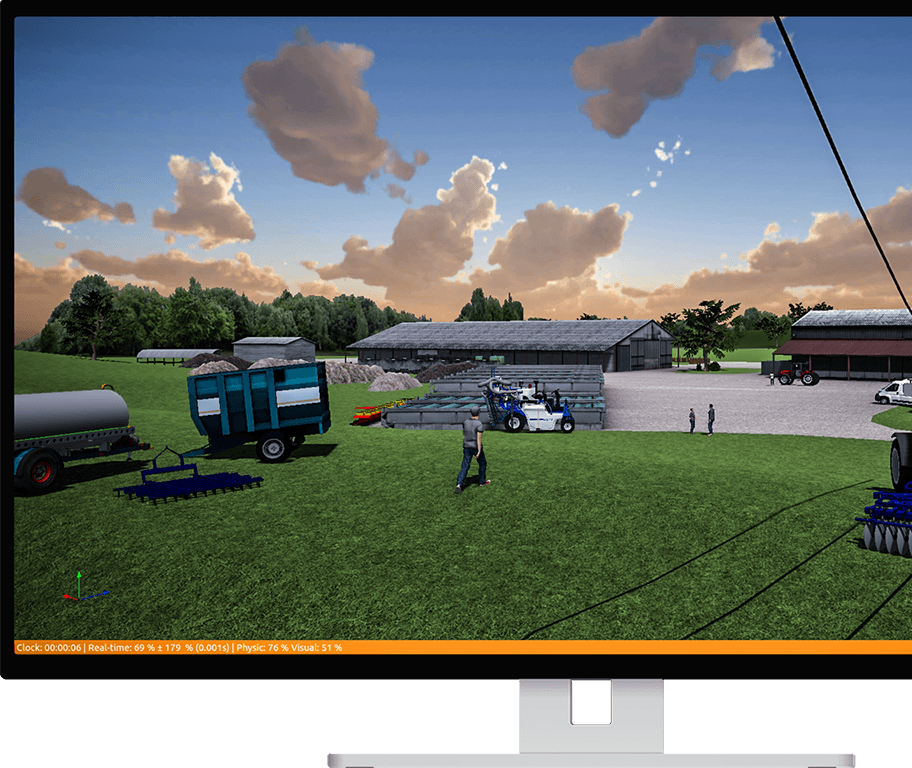
4DV-SIMULATOR allows the simulation of elements available in the models library from 4DV-EDITOR. Beside sensors and systems, you will access environments, objects and agents:
Environments:
- Outdoor: offroad, urban, highway, etc
- Indoor: parking, building, factory, etc
- Realistic reproduction of real environments
Objects:
- Urban property, road signs, etc
- Vegetation, guns
Kinematic and dynamic agents:
- Civilian and military vehicles
- Pedestrians, soldiers, threats
- Robots and drones
Resources

4DV-SIMULATOR allows the simulation of elements available in the models library from 4DV-EDITOR. Beside sensors and systems, you will access environments, objects and agents:
Environments:
- Outdoor: offroad, urban, highway, etc
- Indoor: parking, building, factory, etc
- Realistic reproduction of real environments
Objects:
- Urban property, road signs, etc
- Vegetation, guns
Kinematic and dynamic agents:
- Civilian and military vehicles
- Pedestrians, soldiers, threats
- Robots and drones
