
L I V E S I M U L A T I O N
The 4DV-MONITOR software has been designed to visualize data produced during a simulation, and to perform live interactions with the elements of your scenario.
It allows an instantaneous exploitation of your simulations through the creation of projects. You can multiply and organize the information sources in one or more configurable windows.
4DV – MONITOR
L I V E S I M U L A T I O N
The 4DV-MONITOR software has been designed to visualize data produced during a simulation, and to perform live interactions with the elements of your scenario.
It allows an instantaneous exploitation of your simulations through the creation of projects. You can multiply and organize the information sources in one or more configurable windows.
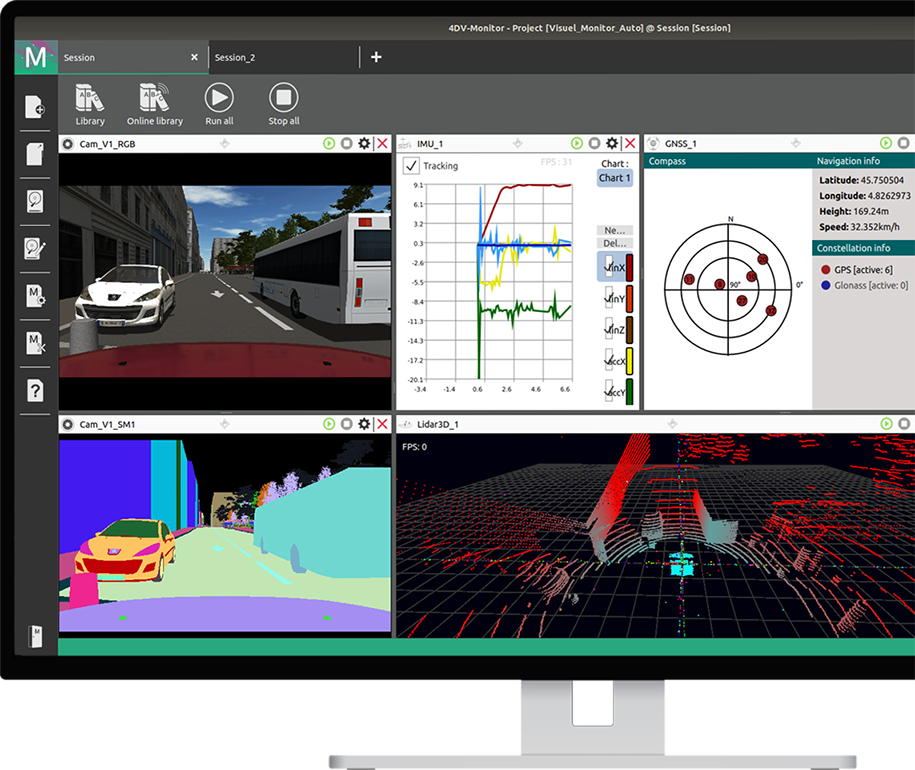
Visualize simultaneously all the data provided by your sensors
4DV-MONITOR proposes a library of viewers dedicated to different sensors (GNSS, IMU, Lidar, …) which provides a fast access to data produced by 4DV-SIMULATOR using video stream / measures. Visualization of data issued from simulated sensors becomes effortless.
Visualization of the data coming from simulated sensors is effortless.
4DV-MONITOR allows to control and to analyse data produced by 4DV-SIMULATOR quickly.
Visualize simultaneously all the data provided by your sensors
4DV-MONITOR proposes a library of viewers dedicated to different sensors (GNSS, IMU, Lidar, …) which provides a fast access to data produced by 4DV-SIMULATOR using video stream / measures. Visualization of data issued from simulated sensors becomes effortless.
Visualization of the data coming from simulated sensors is effortless.
4DV-MONITOR allows to control and to analyse data produced by 4DV-SIMULATOR quickly.
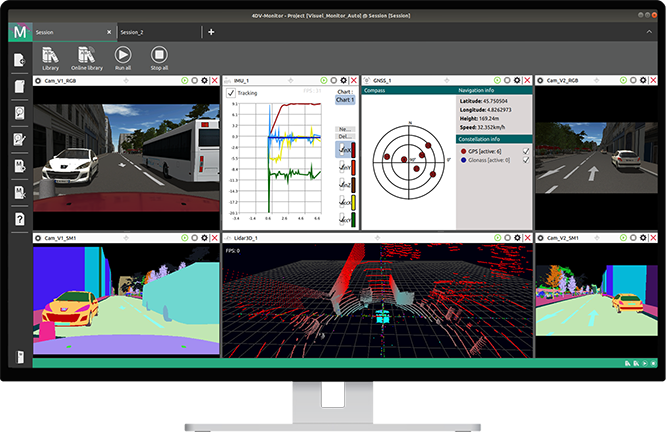
Access internal parameters
of the simulation




4DV-MONITOR gives access to numerous simulation variables such as position of each system, visual parameters (depth field, normal field), semantic segmentation, etc.
Gathering these informations, you can design your own ground-truth sensor with 4DV-EDITOR and visualize them in 4DV-MONITOR.
4DV-MONITOR allows to follow state variations of simulated systems and sensors through different viewers (semantic image, depth image and/or normal, graphs, etc).
Access internal parameters of the simulation

4DV-MONITOR gives access to numerous simulation variables such as position of each system, visual parameters (depth field, normal field), semantic segmentation, etc.
Gathering these informations, you can design your own ground-truth sensor with 4DV-EDITOR and visualize them in 4DV-MONITOR.
4DV-MONITOR allows to follow state variations of simulated systems and sensors through different viewers (semantic image, depth image and/or normal, graphs, etc).
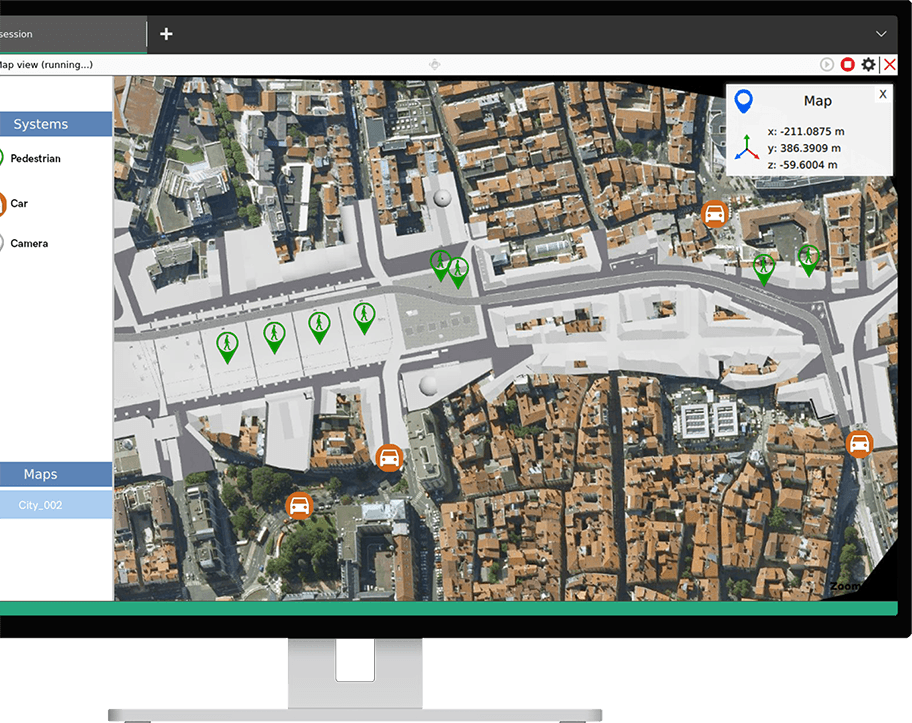
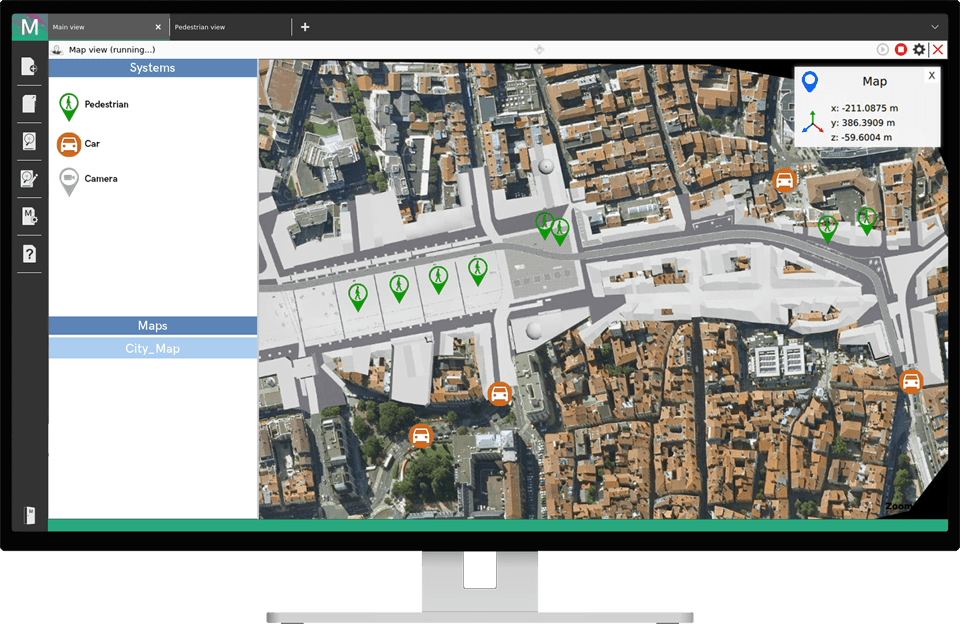
Observe the evolution of your simulation
The VIEWER MAP in 4DV-MONITOR gives you a top-view over your 3D simulated environment to observe the scene.
To access simulated data, you can select each system of the scene to analyse detailed data (sensor parameters, state, etc). You can change the position of the view points during the simulation for a fine description of interesting parameters.
The VIEWER MAP is particularly interesting when performing large scale simulation or using a sensor set-up mounted on an infrastructure of the environment.
Observe the evolution of your simulation
The VIEWER MAP in 4DV-MONITOR gives you a top-view over your 3D simulated environment to observe the scene.
To access simulated data, you can select each system of the scene to analyse detailed data (sensor parameters, state, etc). You can change the position of the view points during the simulation for a fine description of interesting parameters.
The VIEWER MAP is particularly interesting when performing large scale simulation or using a sensor set-up mounted on an infrastructure of the environment.
Manage in live your simulated systems
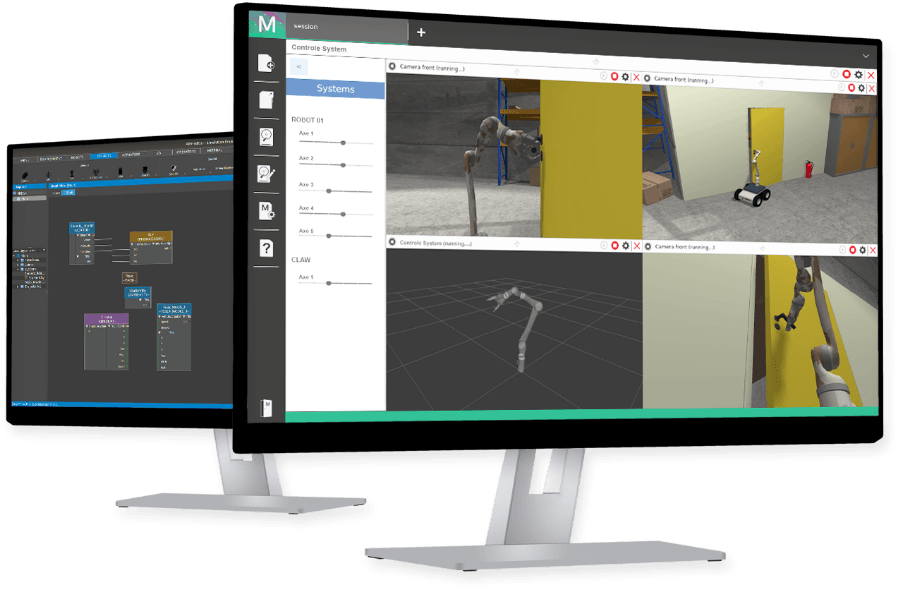
Take control of the parameters of your systems in a running simulation.
4DV-MONITOR allows to define the connections (up/down) with 4DV-SIMULATOR during the simulation, i.e. you can configure the kinematic systems (modification of the position of mechanical parts, turrets, etc).
In addition, this feature allows to interact with the sensors during the simulation, in modifying their parameters and their functioning.
This tool is an asset to increase the added value of your simulations by interacting with your real instrumented systems.
Manage in live your simulated systems
Take control of the parameters of your systems in a running simulation.
4DV-MONITOR allows to define the connections (up/down) with 4DV-SIMULATOR during the simulation, i.e. you can configure the kinematic systems (modification of the position of mechanical parts, turrets, etc).
In addition, this feature allows to interact with the sensors during the simulation, in modifying their parameters and their functioning.
This tool is an asset to increase the added value of your simulations by interacting with your real instrumented systems.
Manage your agents in real-time
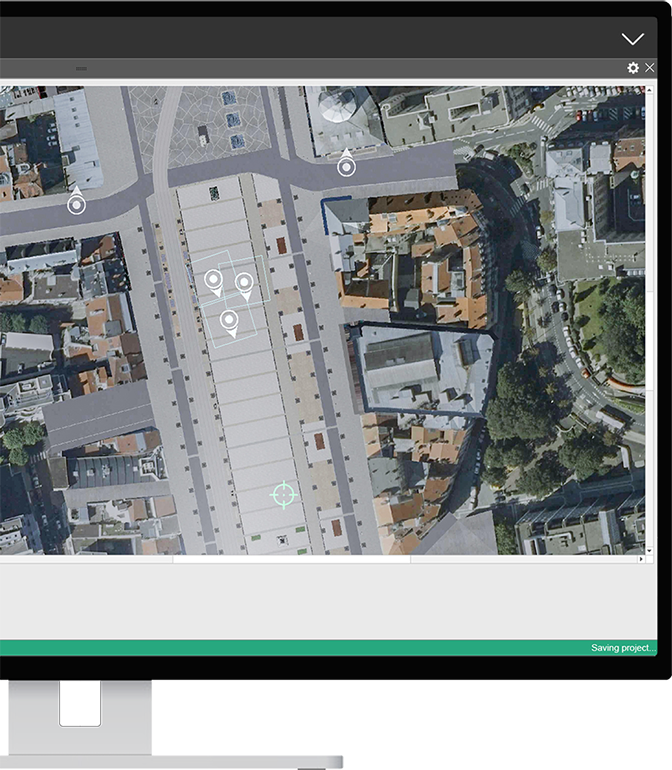
AdvancedMobility module
Beside the previous cited MobilityStandard functionality presented into the 4DV-EDITOR page, you will have access to AdvancedMobility, a module using VIEWER MAP to integrate and control swarms of vehicles and pedestrians during the simulation.
The user interface allows the addition of agents with objectives. They can be controlled alone or by groups with common targets.
AdvancedMobility uses real-time dynamic interactions with the environment, including the static objects, kinematic objects and dynamic systems as well as obstacles.
You will be able to populate your simulation and test your robotic systems.
AdvancedMobility can be used either with the user interface 4DV-MONITOR or with the dedicated API.
Manage your agents in real-time

AdvancedMobility module
Beside the previous cited MobilityStandard functionality presented into the 4DV-EDITOR page, you will have access to AdvancedMobility, a module using VIEWER MAP to integrate and control swarms of vehicles and pedestrians during the simulation.
The user interface allows the addition of agents with objectives. They can be controlled alone or by groups with common targets.
AdvancedMobility uses real-time dynamic interactions with the environment, including the static objects, kinematic objects and dynamic systems as well as obstacles.
You will be able to populate your simulation and test your robotic systems.
AdvancedMobility can be used either with the user interface 4DV-MONITOR or with the dedicated API.
